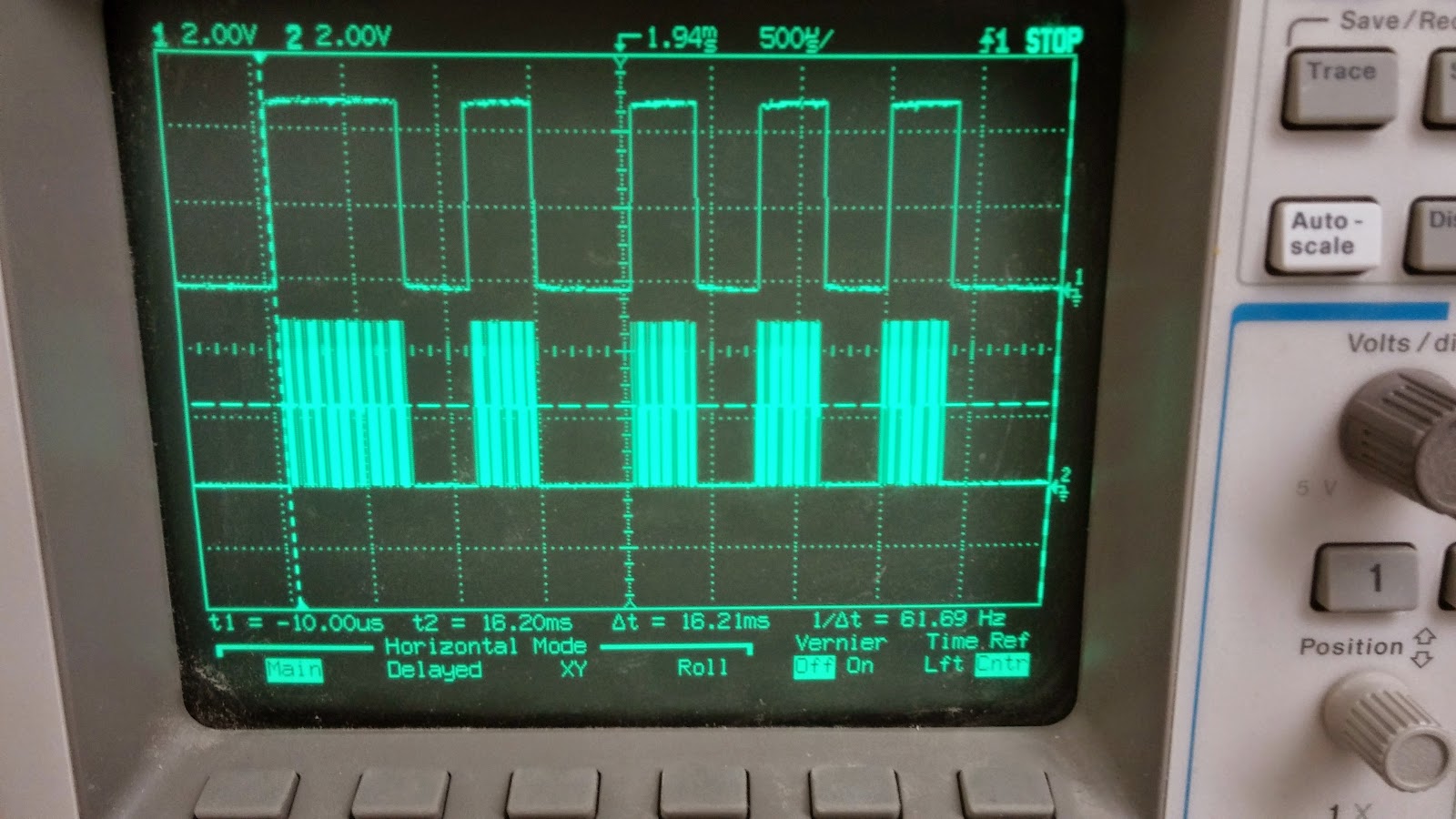
I made some progress on the Quad Copter lap Timing system this past week. I have completed the Transmitter portion, see the pics below. What you are seeing is a long Start bit followed by 0b0010000 plus parity. Modulation is at 57.6 Khz

I have started working on the Receiver and I think I have the base code to receive the ID from the Xmtr. But now there are a lot of architecture options on how to proceed forward and I would like some PaxSpace input. I will be there tomorrow night for Micro-Controller Monday and show what I have done so far and we can discuss the way forward.
My initial architecture is as follows:
- There will be 4 or more receivers talking to a base station
- A 5 wire ribbon cable is used to connect the Base Station to the Rcvr
- +5v, Gnd, SDA, SDC, Time Sync
- A 5 wire ribbon cable is used to connect the Base Station to the Rcvr
- Base station is either:
- Arduino talking to a laptop via USB/WiFi
- Raspberry Pi to a laptop via USB/WiFi
- I2C is used to talk to the Base Station from the Rcvr
- The Base Station is the slave and the Rcvr are the Masters
- Each time the Receiver registers a Xmtr reception it transmit or I2C to the Master
- Each Xmtr sends the ID and the time of the event
- Time synchronization Options:
- A time sync pulse is sent once a minute or less to sync the Rcvrs. A internal timer counts milliseconds between sync pulses
- The sync pulse is sent at 1 Khz and a way is figured out to embed a reset pulse.
- An IRIG like time stamp is sent over the 1 Khz pulse train
I need some help creating the circuit boards for this project. I have done it in the past, but I think my methods are a little out dated.